2. System Overview #
The wheelblastIT is a high-performance, follow-along wheel cleaning system designed specifically for car wash tunnels, featuring electric-powered belt-driven trolleys that slide along five-foot rails. It delivers high-pressure water through rotating nozzles to effectively remove dirt, grime, and brake dust from wheels, ensuring a thorough and efficient wash every time, and providing the benefit of cleaning the wheels of a vehicle as it travels along the conveyor.
2.1 Features & Functions #
innovateIT Car Wash Equipment LLC has developed a follow-along wheel blaster to provide high-quality wheel cleaning.
Each wheelblastIT assembly features a trident with 3 zero-degree rotating nozzles. The system operation consists of a series of electronic signals that control the mechanical functions of trolley movement and high-pressure water sprayed through the 3-nozzle assembly on each trolley.
The wheelblastIT is built with robust materials to withstand the rigors of continuous operation in high-volume car washes, while minimizing maintenance and downtime.
The system’s PLC controls the forward and reverse movement of the trolleys by adjusting the frequency of the VFD based on pre-calculated distances and the rate of the pulse signal. This allows for precise and consistent movement of the trolleys, ensuring that they travel the correct distance to effectively clean each wheel.
The integrated HMI allows operators to view and edit PLC data easily. This makes it simpler to adjust settings and troubleshoot the system, enhancing overall usability and reducing downtime.
Each assembly also includes a ‘Home Proximity Sensor’, which ensures the trolleys return to their home positions accurately, facilitating smooth and precise operations.
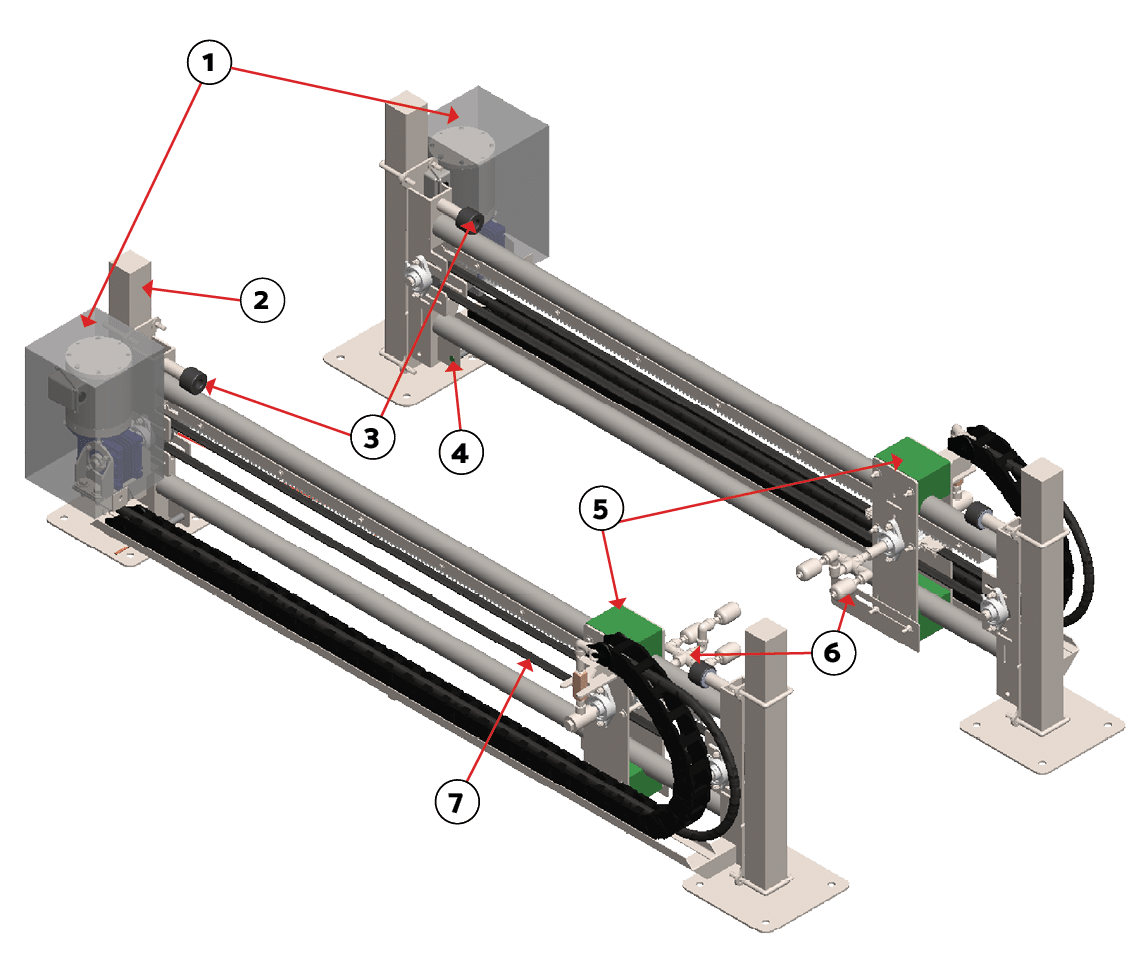
Fig. 2.1 – 1 – wheelblastIT identification
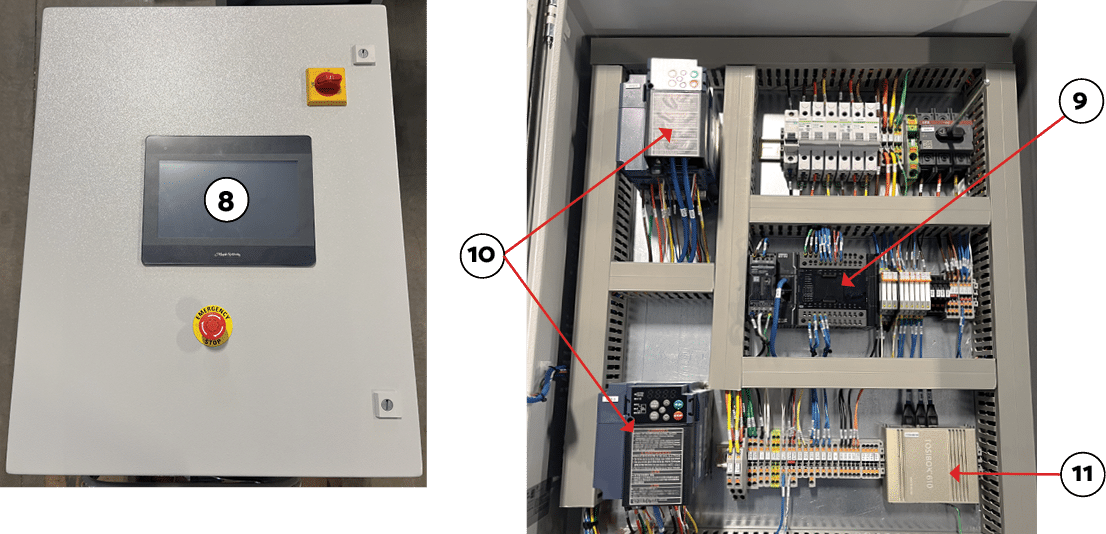
Fig. 2.1 – 2 – wheelblastIT electrical enclosure identification
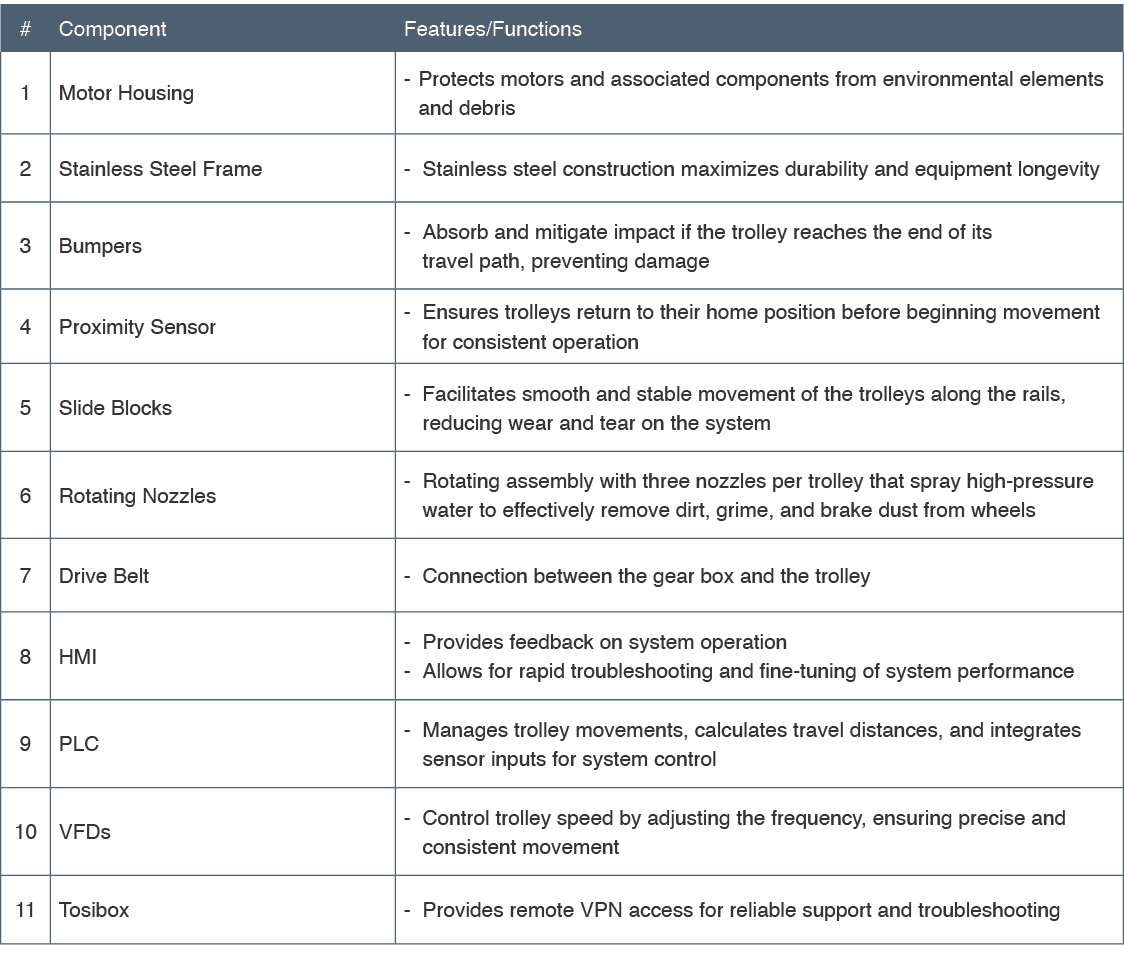
Table 2.1 – 1 – wheelblastIT component features and functions
2.2 System Specifications #
Table 2.2 – 1 – wheelblastIT specifications
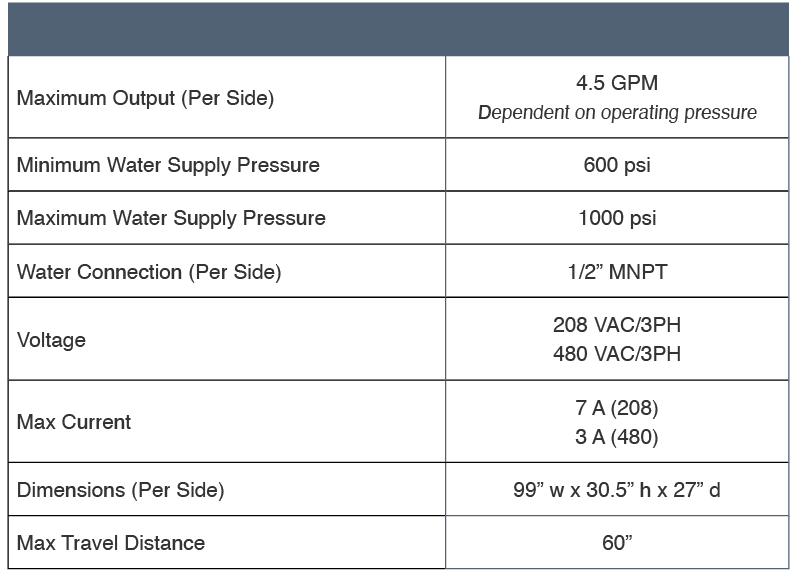

Fig. 2.1 – 3 – wheelblastIT dimensions